5.1. 梁柱节点钢筋避障排布问题描述——多智能体路径规划#
多智能体强化学习(MARL)是求解路径规划问题的有效方法。对于工程实际中复杂的钢筋混凝土结构,通过将每根钢筋抽象为强化学习的智能体,并将设计规则转化为对应的奖励和惩罚,可将无碰撞的钢筋设计问题转化为多智能体路径规划问题,即多智能体在钢筋混凝土构件中,从起点安全地到达已定义的目标点,而智能体走过的路径即是生成的钢筋排布路径。
在此任务中,若在二维平面中,智能体可以选择以下三个动作之一:向前、向左和向右。若在三维空间中,智能体可以选择以下五个动作之一:向上、向下、向前、向左和向右,如图5-2所示。智能体的任务是在规定的时间内成功地通过节点并到达指定目标点,途中不遇到任何障碍。使用上述多智能体强化学习方法,通过收集智能体的轨迹,可得到无冲突钢筋设计的三维坐标。
具体来说,在钢筋混凝土梁柱节点中,钢筋设计的多智能体强化学习过程可分为以下三个阶段,如图5-2所示:(1)在第一阶段中,柱中的纵向钢筋被视为一组智能体,路径环境是无任何障碍的三维梁柱节点;(2)在第二阶段,将x方向梁的纵向钢筋视为一组智能体,将柱内纵筋和箍筋视为障碍物;(3)在第三阶段,将y方向梁的纵筋视为一组智能体,将柱内纵筋、箍筋和x方向的梁筋视为障碍物。
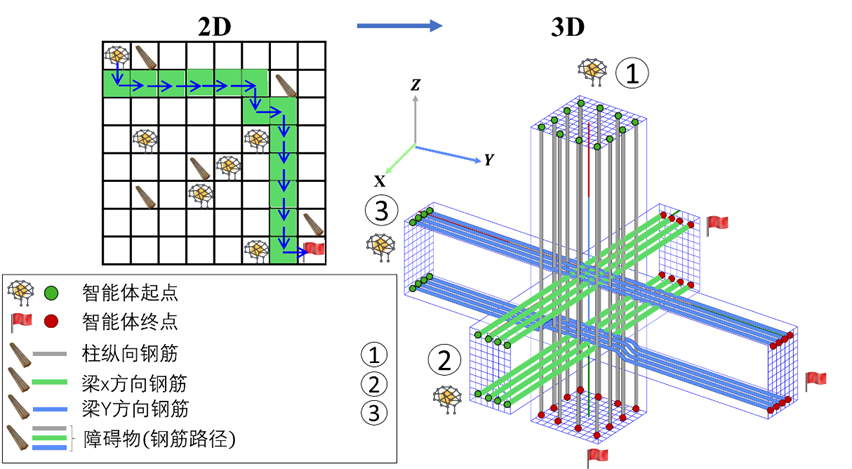
图 5-2 混凝土梁柱节点钢筋设计问题描述